How to troubleshoot USM, HSM , ultrasonic circular motors, on this case was troubleshooting a Sigma 70. Bu çalışmada ultrasonik motor için eşdeğer devre modeli üretilmiş ve uygunluğu araştırılmıştır. Motorun çalışmasını etkileyen sıcaklık, zaman, moment gibi parametreler modele dahil edilmiştir.
Motorun deneysel sonuçlarını elde etmek için bir deney düzeneği kurulmuştur. Deney düzeneğinde frekans, gerilim, moment .
Bu çalışmada son yıllarda robot, uzay uygulamaları, otomotiv, mürekkep püskürtmeli yazıcılar, mikro konumlama tablaları gibi konularda uygulama sahası bulan piezoelektrik malzemelerden yapılmış yürüyen dalga tipli ultrasonik motorun yapısı, kullanım alanları, diğer motorlara göre üstünlükleri, eşdeğer devresi ve. ZET: Günümüzde teknolojik gelişmelere ve endüstriyel uygulamalara paralel olarak, elektrik motorlarının kalite ve çeşitliliğinin geliştirilmesi konusu önem kazanmıştır. ZMİT (Kocaeli), (DHA) – GEBZE Teknik Üniversitesi (GTÜ) minyatür boyutlara kadar küçültülebilen yüksek performanslı yeni nesil ultrasonik motor tasarımını tanıttı. Bu çalışmada yürüyen dalga tip ultrasonik motorun hız denetimi mikrodenetleyici ile gerçekleştirilmiş ve bilgisayar ekranında görsel hale getirilmiştir. Motoru sürmek için sayısal olarak kontrol edilebilen bir sürme sistemi geliştirilmiştir.
Bu makalede, yürüyen dalga ultrasonik motor için sayısal denetimli kompakt bir hız sürücüsü tasarlanmış ve gerçekleştirilmiştir. Sürücü basit, hafif ve küçük olmakla beraber ultrasonik motorun hız ve yön komutları sayısal olarak girilirken gerçek motor hızı, gerilimi ve akımı bir display üzerinden izlenebilmektedir.

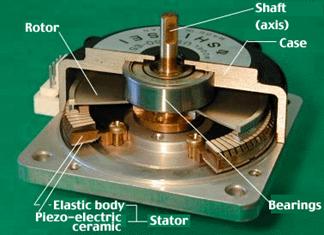
At the heart of the system is a rectangular monolithic piezo- ceramic plate (the stator), seg- mented on one side by two electrodes. Depending on the desired direction of motion, the left or right electrode of the. Ucuza satın alın Canon . Buradaki ultrasonik sözcüğü, bu motorlarn kHz üzerindeki frekanslarda . ULTRASONİK -MİLİMETRİK MOTOR Gebze Teknik Üniversitesi ve TÜBİTAK iş birliği ile henüz dünyada bir örneği olmayan ve teknik anlamda milimetrik motor olarak.
In this project we will be controlling the direction of a motor using two ultrasonic ranging sensors. If the right sensor is triggere the motor. Törek ğalimnäre bötenläy tawıssız eşliy torğan ultrasonik motor citeşterde. In this paper, position control of an ultrasonic motor was implemented on the basis of fuzzy reasoning. A digitally controllable two phase serial resonant inverter was developed to drive the ultrasonic motor by using a TMS320F2digital signal processor.
The driving frequency was used as a control input in the position . English: In this paper, a compact size digitally controlled speed driver for travelling wave ultrasonic motor was designed and implemented. Although the driver system is light in weight, simple, small in size, it is possible to enter speed and direction digitally as well as tracking the real motor spee voltage and current on an . Farkının Etkilerinin Ġncelenmesi. Examining the Effects of Frequency and.
Abstract—Changing techniques of driving frequency, voltage amplitude, phase difference between two phase voltages are.

Because lower amplitude delivers more selectivity and precision, this high- performance handpiece is ideal for work near critical structures and motor centers. Here we are going to interface three ultrasonic sensors with arduino uno. We are also using two Dc motors so for that we need one motor driver module because Arduino itself is not capable to give that much amount of current which is able to run dc motors.
Ultrasonik Motorun Hız Denetimine Frekans ve Faz. So for that we are using Motor Driver Module . This is very simple using the map() instruction. So if both sensors gave equal values, they would offset each other. To make it still work if an object is remove you could .