CAN -based higher-layer protocols bölümüne geç – As the CAN standard does not include tasks of application layer protocols , such as flow control, device addressing, and transportation of data blocks larger than one message, and above all, application data, many implementations of higher layer protocols. CSMA means that each node on a bus must wait for a prescribed period of inactivity before attempting to send a message. This is a brief introduction to the CAN bus protocol. In reality, there are many standards to choose from. Click the tabs below to get started.
CAN is extremely Robust communication Protocol.
Here are three examples why. Any CAN node on the BUS can detect errors in the message, and force the message to be destroyed and retransmitted… this feature helps to ensure that the message a node does receive contains valid data. The CAN Frame requires that. Any CAN use falls under patents held by Robert Bosch GmbH (Bosch), and a license from Bosch is always required when a customer is building any product that uses CAN.
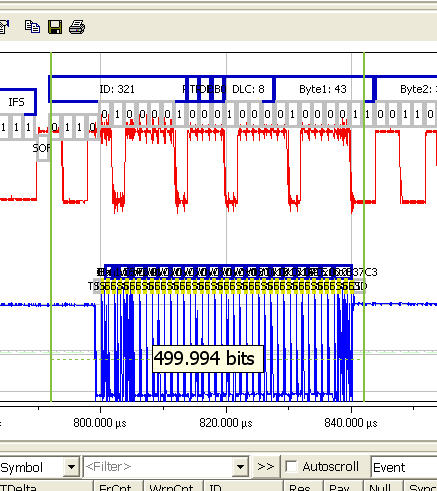
A brief CANBUS protocol description and how it is used at ALMA. CANBus Protocol Frame Can Message Frame. This interface is use employing serial binary interchange.
Information is passed from transmitters to receivers in a data frame. CAN protocol was designed to address this problem.

It laid down the rules through which the various electronic devices can exchange information with each other over a common serial bus. This in turn reduced the wiring connections to a great extend thereby reducing the bulkiness and complexity of the system. CAN (Controller Area Network) is a serial communication technology used especially for reliable data exchange between electronic control units (ECUs) in the automobile. This E-Learning module is intended for all those who want to gain a better understanding of CAN communication technology.
Worst case frame length. The bus arbitration method is the same for both CAN data link layer protocols. This means every node is able to consume any message produced by any other node in the CAN bus system. Originally developed for use as an in-vehicle network in passenger cars, nowadays CAN is used . CAN is a message-based protocol originally designed for automotive applications, but it is also used in other areas such as industrial automation. These protocols are higher level CAN bus protocols.
Controller Area Network ( CAN network) is a vehicle bus standard that allows microcontrollers and devices to communicate with each other within a vehicle. They both use the CAN 2. B standard for the physical and data link layer. Each protocol, however, has different standards for the higher layers in the. OSI model, and thus the way in which data is transmitted and .